
Table of Contents
Overview
Talos Rowing (aka. robostroke) is written in Java.

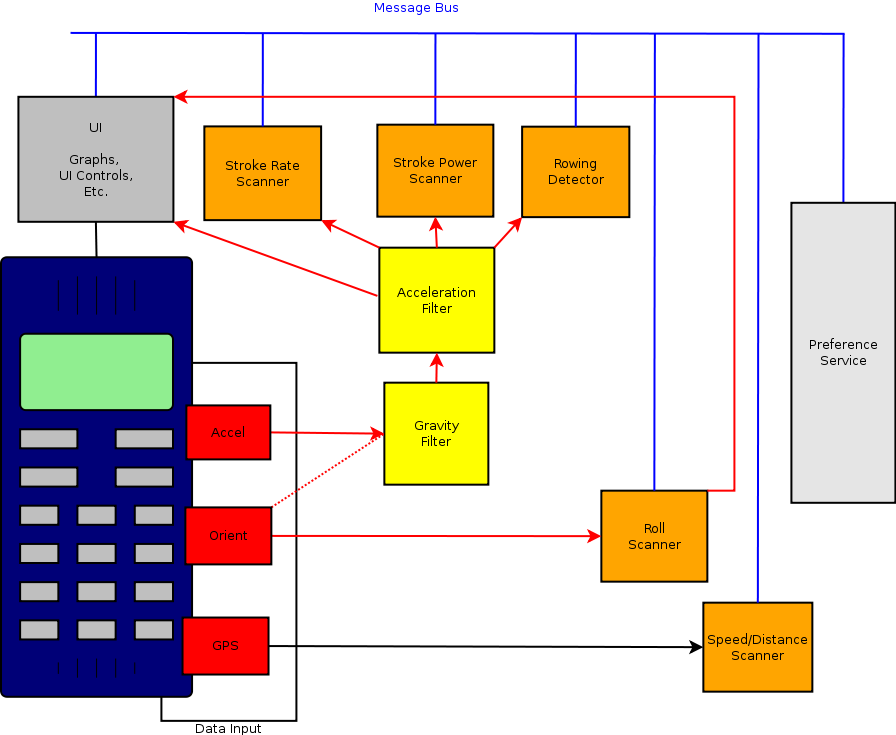
Data input
Data input consists of raw sensor data:
- Accelerometer
- Orientation
- GPS
The data update frequency is also the highest for the accelerometer data.
The raw sensor data does not have to be real-time sensor data from the device running the application. It may be a re-play of a recorded rowing session or - when such code will be written - a sensor data feed from a remote device.
High frequency sensor data flow
The red lines show linear or multiplexed flow of high-frequency data from sensor input sources to consumers via various filters/processors. Sensor raw data maybe either be processed in order to calculate higher-level rowing information - such as stroke rate - or displayed in its near-raw form in graphs.
Message Bus
A message bus is used for low frequency asynchronous message communication between the various components. The various data processors (scanners, detectors) may send various events on the bus - such as the STROKE_START, STROKE_END event produced by the Rowing Detector component.
Project components
3 top-level projects currently exist.
- robostroke-common
Contains UI agnostic code which can be shared with either Android or Swing UI based applications. - robostroke-android
Contains Android specific code and an Android front-end. - robostroke-swing
Contains Swing specific code.
Attachments (2)
-
robostroke.png
(33.3 KB) -
added by tshalif 57 years ago.
PNG render of robostroke.dia
- robostroke.dia (3.4 KB) - added by tshalif 15 years ago.
{kind=link}
{kind=link}
Download all attachments as: .zip